迈尔微视: TOF相机的介绍 分类 基本原理和优缺点
2024-05-08 10:29:58
By: 迈尔微视
ToF相机
不同于使用2D图像来推算3D资讯,ToF是透过红外光在空气中的飞行时间,计算出目标体的距离。ToF技术也是机器视觉工业的重要里程碑,因其只需要使用低成本的CMOS传感器和主动光源技术就能提供3D场景的距离景深资讯。
此外,不同于单点逐点扫描方式,ToF是每个图元都能测量对应目标体的亮度和反射回来的到达时间,从而计算出该点对应的距离景深。ToF提供了视角范围内场景的整个分辨率的距离景深资料。该技术结构简单,容易使用,不依赖环境光,且兼具高精度和高帧率。
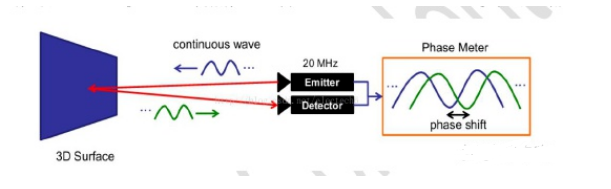
TOF法根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。脉冲调制需要非常高精度时钟进行测量,且需要发出高频高强度激光,目前大多采用检测相位偏移办法来实现TOF功能。
下面图片描述了TOF相机(连续波)的基本原理,实际应用中,通常采用的是正弦波调制。由于接收端和发射端正弦波的相位偏移和物体距离摄像头的距离成正比,因此可以利用相位偏移来测量距离。
TOF的优缺点包括:
检测距离远。在激光能量够的情况下可达几十米。
受环境光干扰比较小。
对设备要求高,特别是时间测量模块。
资源消耗大。该方案在检测相位偏移时需要多次采样积分,运算量大。
边缘精度低。
限于资源消耗和滤波,帧率和分辨率都没办法做到较高。目前消费类最大也就VGA。
其他栏目内容

《齐鲁晚报 · 齐鲁壹点》专访迈尔微视总经理郑卫军:给机器人装上了“眼睛”
迈尔微视的3D视觉+AI解决方案已经集成了视觉导航、视觉避障、视觉对接和视觉抓取等技术,并且批量应用...
- 2025-03-03 16:28:30


迈尔微视获“2023-2024双年度移动机器人行业优质供应链”奖
迈尔微视自团队成立以来,始终专注于移动机器人安全性、稳定性和智能性的提升。通过3D视觉传感器+AI算...
- 2024-12-24 14:05:25