3D视觉定位系统方案 操作简单 高效稳定
专业针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机器人自动化生产线的柔性工装。
迈尔微视科技自研的3D视觉传感器具有高分辨率、高精度的特点,可以为客户提供可靠的彩色图、深度图和点云。空间分辨率达到230万像素,深度测量精度zui高可达0.2mm。硬件上采用GPU加速,3D成像速度*快可达0.4S。
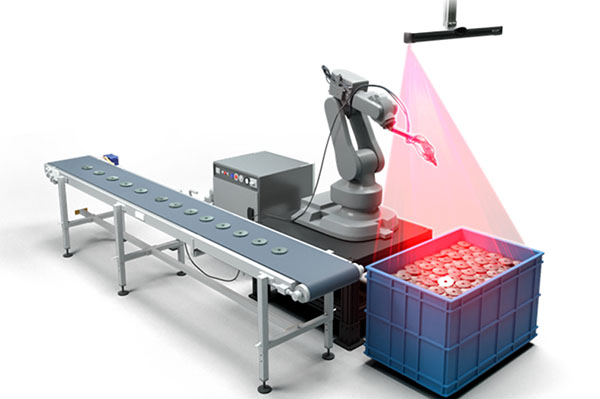
3D视觉传感器可以为机械人提供视觉引导的基础,广泛应用于订单拣选、混合分拣、码卸垛、装箱、零件分拣、上下料、三维重建、体积测量等。
快递包裹分拣
某快递公司的分拣中心,在进行包裹分拣时,快递员将收到的各种类的包裹(纸箱、邮件、软包)统一散乱堆放到分拣处,然后由人工逐个拾取放置到分拣输送带上。这种人工分拣方式效率低下,满足不了快递行业日益发展的快速要求。
快递分拣
技术分析:
方案要求实现无人化分拣流程
料框堆叠不同形状的袋装包装和盒包装无法用传统二维识别
包装形状各异,尺寸各异
人工拣选速度和质量受个人情绪等影响,极不稳定
人工 拣选多造成内部快件不确定损伤
解决方案:
通过机器人3D定位系统,引导机器人从包裹箱抓取包裹放置到传送带
通过3D视觉方案实现三维扫描定位
选用定制兼容型通用视野的产品型号
设用机器人设定抓取后扫描位置再放置到输送带
设定机器人轻拿轻放机制,确保拣选过程零损伤
客户收益:
1、产品兼容性可免去产线换装问题,节省成本
2、完全实现自动化提高生产效率降低损毁率
3、替换人工,大量节省人力成本和完全成本
4、享受完善的售后服务和技术支持
其他栏目内容

《齐鲁晚报 · 齐鲁壹点》专访迈尔微视总经理郑卫军:给机器人装上了“眼睛”
迈尔微视的3D视觉+AI解决方案已经集成了视觉导航、视觉避障、视觉对接和视觉抓取等技术,并且批量应用...
- 2025-03-03 16:28:30


迈尔微视获“2023-2024双年度移动机器人行业优质供应链”奖
迈尔微视自团队成立以来,始终专注于移动机器人安全性、稳定性和智能性的提升。通过3D视觉传感器+AI算...
- 2024-12-24 14:05:25